人形机器人的触觉与语音能力正在飞速迭代
借助生成式AI与智能体AI,人形机器人在执行各类任务方面正取得重大进展,而且这项技术的到来恰逢其时。目前相关预测表明,未来数年,这类系统将成为人类生活不可或缺的一部分。如今,人形机器人主要应用于电子与汽车工厂、仓储物流以及专业清洁场景。不久之后,人形机器人有望走入家庭,充当陪护或助手角色,尤其服务老年群体。
而这仅仅只是开端。楷登电子CEO Anirudh Devgan在近期演讲中表示:“机器人产业或将成为有史以来规模最大的产品品类。预估市场规模将达到25万亿美元,而全球GDP总量也仅为110万亿美元。一旦落地普及,体量将无比庞大。”
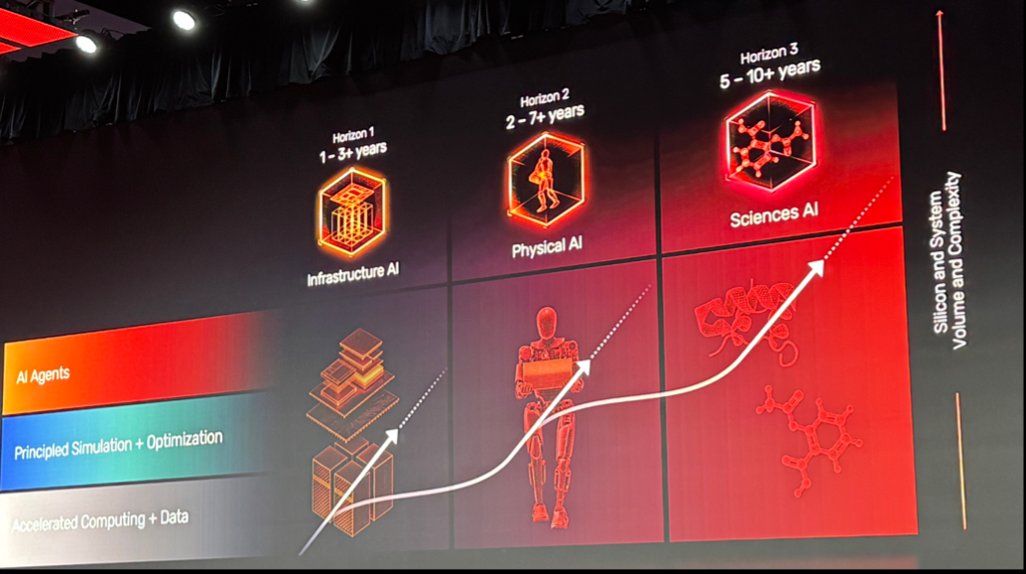
图1:各类技术落地时间周期
人形机器人虽仿照人类形态,但无需在各方面完全复刻成年人外形。例如,体型可以像孩童一般小巧,手部也可以仅设计三根手指。人类感官与人形机器人传感系统存在诸多相似之处。每一种人类感官及对应的机器人传感技术都处在研发阶段,各自面临特有难题,且成熟度参差不齐。视觉与语言感知走在前列,嗅觉和味觉发展相对滞后。
新思科技产品营销总监Marc Swinnen表示:“自然语言技术如今已十分成熟,因为它应用场景极广,并非只局限于机器人领域,行业规模效应也反过来助推了技术发展。机器视觉同样已高度成熟,但仍面临与自动驾驶相同的难题——需要精准解析物体语义,这绝非易事。至于触觉传感,目前压力传感器、纹理感知技术已有不错水准。每位研究者都会声称自己所研究的感知最难,但实际上整套多感知融合体系本身就是巨大挑战。”
所有物理AI相关技术都仍有待完善,触觉、压力感知皆在此列,而AI正让人形机器人的学习速度大幅提升。
西门子EDA产品负责人Sathishkumar Balasubramanian称:“传感硬件我们一直都有,也早已具备感知外界、并将传感信号转化为数字图像或数字特征的能力,能够区分不同物体的触碰差异。技术底子一直都在,只是过去无法做到像人类一样智能感知。而大语言模型的出现补齐了这一环,可作为人形机器人的‘大脑’统筹一切:语音解读、触觉感知、肢体动作、逻辑推理、行为反馈全都能由其驱动。依托大语言模型与Transformer架构,我们得以快速实现这一切。”
在触觉研发方面,人形机器人正借鉴工业机器人的成熟技术路线。Synaptics高级产品营销经理Sam Toba表示:“针对人形机械手的真实场景触觉研究目前仍十分匮乏,但工业机械臂末端早已普及多功能机械手,机械臂的应用场景也极为广泛。”
另一大前沿领域是语音识别与语音交互。相关应用持续扩容,无论是搭载大语言模型的人形机器人与人对话交流,还是与智能家居设备联动交互,都在快速落地。Synaptics物联网与边缘AI处理器业务副总裁兼总经理John Weil指出:“语音领域的技术迭代速度极快。如今的语音模型,对比几年前的版本,综合能力提升幅度高达百倍。”
德州仪器机器人与工业自动化总经理Giovanni Campanella认为,触觉与听觉是最难突破的两大感知能力。“大众对视觉摄像头的认知已经非常普及,毕竟与人眼原理相通,相关研究文献丰富、产业生态完善。但听觉与触觉领域的研究积累十分薄弱,行业客户对此认知有限,却又最希望在这两块实现突破。企业的需求也从单纯给机器人加装摄像头,转向增设更多感知能力,让机器人变得更智能。”
在国内,机器人企业正在研发搭载视觉与AI算法扫地机器人。英飞凌科技电源与传感器系统部门总裁Adam White介绍:“这类设备依托边缘算力完成大量室内视觉解析,比如识别地面水渍、区分木地板与地毯材质。同时借助AI构建室内地图,优化省电策略,实现高效清扫。除此之外,清扫过程中还能分析灰尘分布,判断室内高频活动区域。这正是行业演进路径:从生成式AI,到智能体AI,再进阶到物理AI。”
图2:视觉技术原理复杂,但行业认知与技术生态最为成熟
随着技术持续加速迭代,精密传感与算力集成能力的升级,正在为人形机器人开拓全新应用可能。
英伟达正着力攻克精度控制与灵巧操作难题。英伟达机器人与边缘AI业务副总裁兼总经理Deepu Talla表示:“在物理AI及大多数机器人应用中,对精度要求极高,往往需要达到多个9的准确率。场景不同标准也不同:部分场景只需两位精度冗余,自动驾驶可能需要十位,手术机器人的精度要求则更高,这是行业面临的核心挑战。”
基础简易操作包括双指抓取、吸附拾取等。Talla称:“行业终极目标是实现通用型机器人,完成高精度、高灵巧的精细操作,这需要先进的传感器、执行器,并以安全、实时的控制算法做支撑。我们需要将通用AI大脑的数据能力,与机器人内部全套物理硬件系统深度融合。”
英伟达还与楷登电子合作,为物理AI嵌入智能体AI能力,将物理AI芯片IP与机器人仿真函数库相结合,助力人形机器人及自主设备缩小仿真到现实的落地差距。AI智能体可联动全工作流程,通过虚拟训练、物理建模、全域场景仿真,攻克现实中的复杂作业难题。
想要突破感知推理与肢体运动的双重瓶颈,就必须解决多重难题。Imagination Technologies产品管理总监Matthew Bubis认为:“人形机器人首先要攻克极其复杂的机械结构难题,其次还要解决如何将AI模型输出指令,精准控制整套复杂机械系统的问题。汽车行业只需解决机械难题,而机器人要同时攻克AI算法与机械工程两大难关。汽车的机械与传感技术早已成熟,人形机器人则卡在最后最难的闭环控制环节。”
触觉感知
手部与手指运动控制,是人形机器人最难实现的输出能力之一。
手部传感层面,触觉本质是接触感知,依靠传感器检测作用力、剪切力、滑移与温度,系统通常还会集成惯性测量单元IMU。触觉传感包含多种技术路线:电容传感、压电传感、光学传感、磁性传感、电感传感、电阻传感,各类方案各有优劣。
Synaptics Toba表示:“各类传感原理大同小异,但芯片配套的物理传感器形态差异极大。”
所有原始传感数据都会汇总整合,形成可识别的有效事件。Toba介绍:“我们的触觉芯片内置机器学习算法,目前已用于噪声检测,同时也可实现力值检测,需要大量前端运算处理才能输出有效数据。我们主打电容传感方案,最大优势是响应速度极快。触碰交互中,必须快速感知动作、作用力,尤其是剪切力。例如手握易拉罐发生滑移时,系统需要立刻感知剪切力并调整握持力度,避免物体滑落。”
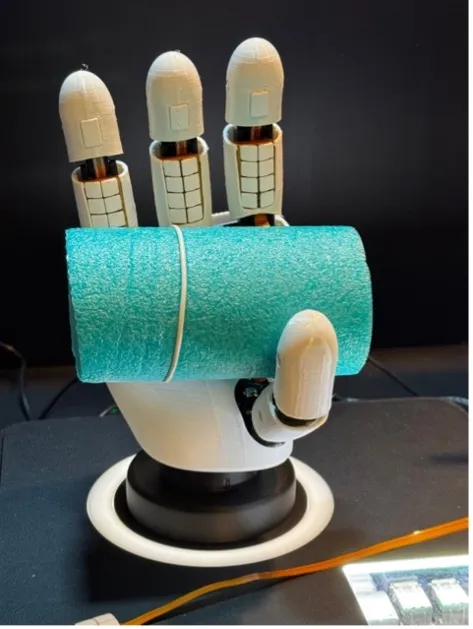
图3:基于Grinn与Synaptics技术的AI机械手压力传感器
手掌内置MCU或MPU实现边缘预处理,可避免主控CPU算力过载。Toba指出:“如果每根手指都单独走线连接主控,会极大增加机械设计负担。我们在前端完成数据降噪与筛选,大幅减少上传至主控的数据量。机械手搭载四种传感模式,高频持续采集数据,全部上传极易造成过载。同时边缘预处理还能节省功耗:待机进入低功耗检测模式,感知到触碰事件后再唤醒并上报主控。行业普遍采用分层架构,区分算力、功耗与处理器等级。”
Synaptics战略与业务拓展高级总监Nebu Philips解释:不同触觉传感器的数据聚合属于同类传感融合;而行业常说的传感器融合,多指雷达、激光雷达、触觉、语音等跨模态传感融合,二者概念不同。网格传感器最小尺寸仅5×5毫米,支持60个传感通道;还有3×3毫米的超小型型号,适配不同通道需求。
机械手本地闭环处理可加快手指反应速度;若通信协议带宽足够,也可交由中央主控统一处理。德州仪器Campanella表示:“手掌可布置多达30颗传感器,手指内部通过磁性或电容传感器形成矩阵阵列,既能定位触碰位置,也能识别触碰力度,反馈给电机控制系统形成闭环调节。例如握持玻璃用力过大会导致碎裂,这类场景必须依靠极速闭环运算。行业有两种技术路线:一种在边缘端就地处理,与电机快速闭环;另一种依托千兆及以上高速通信,将数据回传机器人主控大脑。如今以太网、车载SerDes如FPDLink等技术,带宽均可超千兆,完全满足需求。”
不同应用场景适配不同技术方案。嵌入式物联网专业机构Grinn创始人Robert Otręba认为:“人形机器人或机械臂并非都需要完整五指结构,双指甚至单指即可实现基础触觉交互。大众普遍误以为人形机器人必须完全复刻人类外形,实际上我们可通过触觉控制器与微型芯片,将人类行为逻辑迁移到机器人身上。微型芯片可就近布置在传感元件旁,完成数据采集、预处理、降噪与信号规整,无需长距离传输信号造成损耗。第二层算力部署可集成在机械手本体,不必全部交由中央主控,让机械手具备本地智能,预处理多传感器数据后再上传机器人核心系统。”
工业场景中,机械臂触觉控制器可结合视频解析,识别真实手势并输出传感数据。Otręba称:“部分场景通过Wi-Fi外接系统做运算成本最低,落地路线有多种选择,关键要在每一层环节都植入本地智能处理能力。”
语音交互与自然语言对话
人形机器人需具备自然语言聆听与应答能力,理想状态下可实时交互、口音自然适配,但不同语种与地域口音仍是技术难点。
Synaptics Weil表示:“从原理上讲,语音技术本身并不复杂,难点在于需求界定与方案取舍:是做一套通用模型,还是做多区域定制模型?可以打造通用英语大模型,也可在系统中加入地域识别能力,动态切换本地化语音模型,提升响应速度与体验。若强行用一套模型适配全球所有口音,模型体量会大幅膨胀,成本与硬件内存开销随之飙升。我们目前就在协助客户在性能、成本、硬件资源之间做好平衡。”
以日本市场为例,用户认可模型的母语交流能力,但仍有诸多细节诉求。Weil说:“有用户反馈机器人用词过于年轻化,缺乏应有的礼貌分寸。客户希望语音音色和措辞像35岁成年人,而非18岁年轻人。”
大模型普遍具备俚语理解能力。“本质就是语义匹配。”Weil解释道,“首先将英文语音转为语义词元,再通过近邻算法做语义匹配。我们常用三维空间模型向客户演示:词汇在空间中形成关联网络,同时关联问答知识库,这正是检索增强生成RAG的核心逻辑。整个流程是语音转文字、再转为数值语义做数据库匹配,最后反向语音输出。日本用户的核心诉求就是听得懂、答得得体,用词符合社交礼仪。”
语境理解同样关键,AI模型需要自主判断何时应答、何时静默。“家人聊天时,孩子能听懂对话语境和意图,无需点名也能感知话题是否朝向自己,靠语气、声源方位就能判断。”Weil举例,“咖啡机可以实现语音唤醒与语音应答,但如果我和家人在房间闲聊要煮咖啡,并不希望机器误触发。我们必须教会机器理解对话语境。”
恒温器、机器人等嵌入式终端,同样需要在方案之间权衡。Weil表示:“是接入GoogleVoice等云端服务、设备部署轻量化智能体,还是自建闭环系统?巨头厂商希望用户接入其云端生态,但终端设备厂商不愿将数据与权限开放给谷歌、苹果,就像车企不愿预装AppleCarPlay或安卓车机一样,更倾向自研高画质、强语境的本地语音系统。我们曾在CES展会上演示阵列麦克风声源定位,机器不仅能听懂语音,还能识别说话人的方位,补足语境信息。”
整机厂商已在布局人形机器人与烤箱、微波炉、冰箱等家电联动场景。德州仪器Campanella称:“例如家电语音提示‘餐食已备好’,机器人接收指令后取餐送达。但家庭环境噪声复杂,孩童交谈、扫地机运转都会形成干扰,系统必须精准区分声源与人声,声源定位能力至关重要。”
边缘语音应用需要多重技术保障,精准筛选有效人声、隔离环境杂音。Campanella表示:“核心在于优质信号链路,借助音频编解码器放大有效人声、抑制噪声。如今边缘端集成大量智能算法,搭配硬件加速器,可在部署前完成模型训练,精准区分指定声纹与无关杂音。依托模拟电路与嵌入式处理、高信噪比信号链路,以及搭载硬件加速器的MCU,才能攻克语音交互难题。”
结语
全球不同市场对机器人、人形设备及人机交互界面的普及节奏存在差异。
Imagination Technologies产品管理高级总监Rob Fisher表示:“中国车企正把前沿创新落地到车载体验,大力普及语音交互、超大中控屏等配置,消费者对体验升级的需求十分旺盛。欧洲市场相对保守,更看重安全配置;而中国及亚洲市场,体验创新已是汽车与机器人产品的核心卖点。”
咨询机构Kearney在近期报告中梳理了机器人现有应用场景及对应机型,指出相较于多关节机器人、协作机器人,人形机器人目前渗透率仍偏低,仅覆盖九大潜在场景中的四类,专业清洁是人形机器人优势较为突出的应用领域。
新思科技产品管理高级总监Matt Commens认为:“机器人应用遍地开花,但仍面临诸多挑战。CES展会上众多企业都在仿生研发,背后需要复杂的决策软件、大量电机与传感器、设备间无线通信,还要适配复杂现实环境。这正是当下行业研发的重心,期待未来能有更多商用人形机器人走入家庭承担家务。”
工业4.0早已全面普及机器人自动化。Commens称:“以往人工造车的工序如今已全部由机器人完成,自动化持续替代重复性劳动。人们习惯了电脑端AI智能体,也期待现实生活中有同类智能设备落地。但实体机器人不只是软件算法,更离不开硬件工程支撑。”
本文转自媒体报道或网络平台,系作者个人立场或观点。我方转载仅为分享,不代表我方赞成或认同。若来源标注错误或侵犯了您的合法权益,请及时联系客服,我们作为中立的平台服务者将及时更正、删除或依法处理。




联系电话:
010-61853490
新闻投稿:
server@icviews.cn
商务合作:
business@icviews.cn
问题反馈:
19800315212(微信同号)


半导纵横公众号

半导纵横小程序