1.7mm微型传感器实现六维力觉感知
研究人员研发出一款米粒大小的传感器,它依托光线而非传统电子器件,便可全方位检测作用力与扭转运动。这款新型传感器能够让机器人工具和医疗设备实现接触“感知”,尤其适用于微小尺度场景。
上海交通大学的研究团队负责人杨建龙表示:“现代成像系统虽能清晰呈现组织结构,却无法提供力、扭矩等物理交互信息;而现有的力传感器往往体积过大、结构复杂,难以集成到微型器械中。通过让机器检测接触力、压力、剪切力及扭转力,我们的技术有望使机器人提前识别危险接触并实时调整动作,在狭小、敏感的作业环境中尤为实用。”
研究人员在《Optica》期刊上介绍了这款新型传感器。其尺寸仅1.7毫米,可通过单一光信号同时完成全向力与扭矩的检测。概念验证测试表明,该传感器能够检测模型的刚度变化,还可定位组织内嵌肿瘤模拟模型中的隐蔽结构。杨建龙称:“微创手术机器人需在眼部内部、狭窄手术通道等极小空间内作业。这项技术能提升手术器械与机器人的安全性和精准度,让精细医疗手术更可控,降低意外损伤风险。”
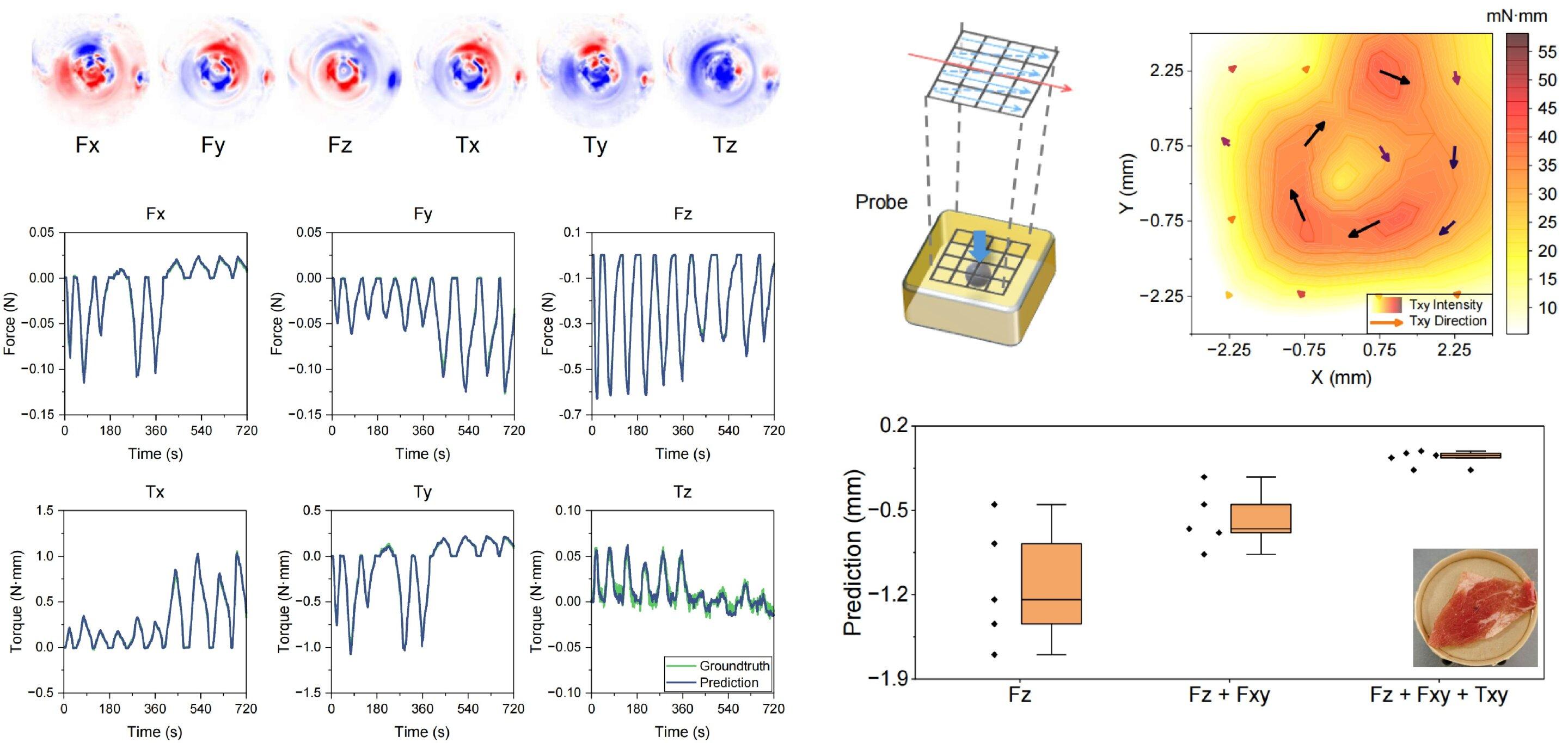
左上侧图片展示了不同力和扭矩轴对应的光学响应图谱;左下侧为时变负载条件下的六维测量结果,并与基准参考传感器数据进行对比;右侧为肿瘤定位模拟实验结果,展示该传感器如何结合正向、剪切与扭转交互作用,识别隐蔽结构。
以光复刻触觉
此项研究是面向微创手术与机器人系统开发光学传感技术的阶段性成果。传统方案依赖多个传感单元或复杂结构,而研究团队旨在打造一款结构简易、成本低廉的设备,仅通过单一光信号即可同步测量全向力与扭矩。
为摒弃传统电学传感器、改用光线捕捉物理交互,团队设计的传感器由光纤与柔性弹性体探头组成;探头接触物体时会产生轻微形变。即便微小形变,也会改变探头内部光学腔的光场分布,形成特定光场图案。该图案经由相干光纤束传输至相机,以图像形式被采集记录。
相干光纤束可保留传输光场的空间信息,仅需单一光路通道即可完成全部传感工作,无需复杂布线与多组传感元件。随后通过数据驱动算法解析图像,解算出各个方向的作用力与扭矩。
杨建龙表示:“我们这款传感器的工作原理有别于传统微型力传感器,例如光纤布拉格光栅(FBG)系统需要依靠多组传感单元和精密结构分离不同力分量。我们并非逐项拆分测量受力,而是一次性感知整体接触状态。这种技术思路的转变,更易打造兼具视觉探测与触觉感知的紧凑型智能器械。”
表层之下的触觉感知
研究人员搭建可控实验平台开展传感器性能测试,施加已知大小的力与扭矩,同步记录光学响应。实验采用高精度力扭矩参考传感器作为基准标定,搭配电动位移台模拟复合受力、扭转等各类复杂负载工况。实验结果显示,该传感器测量精准、重复性好,滞后误差极低,加载与卸载过程的检测数值基本一致,即便在复杂负载条件下仍表现稳定;同时在温度变化、探头弯折的工况下,性能也能保持可靠。
研究团队还开展了肿瘤触诊模拟测试:在明胶中嵌入硬质球体模拟皮下肿瘤,传感器可精准检测并定位内嵌物体。这类感知能力,可为微创手术的触觉引导与力学图谱构建提供支撑。
下一步,研究团队计划从实验室验证迈向实际应用:提升器件制造一致性,降低复杂标定依赖。同时将传感器集成至相关医疗器械与机器人系统,开展真实工况下的长期稳定性测试。商业化前还需进一步优化,保障规模化应用的性能可靠性,并将整套系统封装为小巧易用的形态,方便在医疗与工业场景快速部署。
本文转自媒体报道或网络平台,系作者个人立场或观点。我方转载仅为分享,不代表我方赞成或认同。若来源标注错误或侵犯了您的合法权益,请及时联系客服,我们作为中立的平台服务者将及时更正、删除或依法处理。




联系电话:
010-61853490
新闻投稿:
server@icviews.cn
商务合作:
business@icviews.cn
问题反馈:
19800315212(微信同号)


半导纵横公众号

半导纵横小程序