现场可编程,柔性折叠薄片机器人新进展
近日,施普林格·自然旗下的学术期刊《自然-通讯》发表了一篇关于柔性折叠薄片机器人的研究论文,展示了这一新型机器人的潜在应用和前景。研究团队在这一领域的突破,可能为智能医疗、环境探索及触觉显示等多个领域带来革命性的改变。
这款柔性折叠薄片机器人是由韩国科学技术院的Inkyu Park和Jung Kim等研究人员共同开发的。他们的研究表明,这种机器人能够通过改变形状来抓取物体和在物体表面移动,展现了非凡的灵活性与适应性。
在本项研究中,研究团队合作制作出一个机器人折叠薄片,使用密集分布的热敏电元件构成,受热可改变形状。他们用一张40平方厘米的薄片展示了这一方法,该薄片由308个兼具加热器和感受器功能的电阻构成。这种双功能使之可以实现精确控制移动,系统可根据感受器反馈作出持续调整。
传统折叠机器人依赖预置铰链结构,限制了形状重构的自由度与适应性。现有系统多需在部署前固定铰链配置,无法在动态环境中实时调整。
现场可编程机器人折叠片
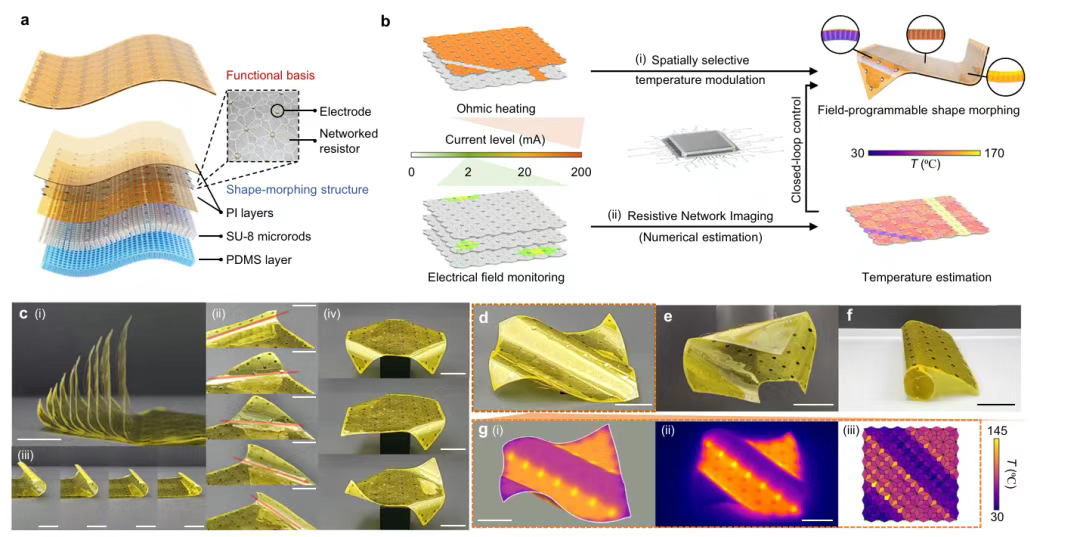
这项研究的核心在于其设计理念:使用热敏电元件构建的折叠薄片,能够根据热量的变化而改变形状,解决了传统铰链结构不可重构的难题。研究还设计了一种双层电热响应聚合物(聚酰亚胺/PDMS),嵌入308个镍铬合金网状电阻作为分布式执行器与传感器,结合闭环温度控制算法,可在部署后远程操控薄片完成抓取、爬行等任务。实验验证其折叠角度达-90°至109°,响应带宽提升3倍,且经受1000次折叠循环无损耗。
功能层:蛇形镍铬合金电阻网络(150nm镍+3nm铬黏附层)嵌入聚酰亚胺基底,兼具加热与温度传感功能(电阻温度系数α=0.006/K)。
变形结构:双层聚合物(聚酰亚胺+PDMS)通过热膨胀系数差异(45 vs 340 ppm/K)驱动折叠;SU-8微棒阵列增强PDMS/PI界面结合力,解决分层问题。
微结构:光刻制备SU-8微柱网格,提升横向热应变与机械耐久性。
这款柔性的折叠薄片机器人能够爬行过表面,以及抓抬培养皿、塑料包装和木棍等各种物品,充分展示出其灵活性。研究表明,折叠薄片机器人可实现大范围的折叠角度,并在一定温度范围内(30°C到170°C)保持性能一致性。此外,其自主系统还能快速精确响应环境变化,以保障稳定性和效率的提升。
论文作者总结认为,这一可编程的柔性折叠薄片机器人能提升自主系统的多功能性和可适应性,使之能更有效地在不可预测的地形上发挥功能。不过,后续研究应用还需要材料技术和结构设计的进步,才能充分挖掘该技术的潜力。
该研究首次将场可编程逻辑器件(FPGA)与分布式电阻网络结合,为软体机器人提供嵌入式控制范式。RNI技术拓展了内嵌式传感在动态形变系统中的应用。在实际落地层面,为地外探测、医疗微型机器人等场景提供多形态自适应硬件平台。
本文转自媒体报道或网络平台,系作者个人立场或观点。我方转载仅为分享,不代表我方赞成或认同。若来源标注错误或侵犯了您的合法权益,请及时联系客服,我们作为中立的平台服务者将及时更正、删除或依法处理。




联系电话:
010-61853490
新闻投稿:
server@icviews.cn
商务合作:
business@icviews.cn
问题反馈:
19800315212(微信同号)


半导纵横公众号

半导纵横小程序