补齐短板!清华团队构建具身智能工业机器人完整技术框架
针对当前具身智能机器人技术在工业场景落地中普遍面临的部署困难、适应性弱等挑战,近日,清华大学深圳国际研究生院曾龙副教授和冯平法教授团队系统定义了具身智能工业机器人(Embodied Intelligent Industrial Robotics, EIIR)概念体系,并提出知识驱动的技术框架,为该领域的理论深化与工程应用提供了全新视角。
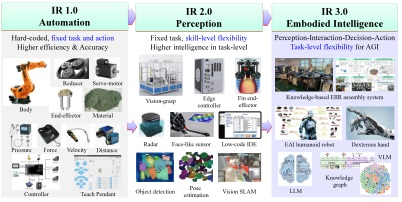
图1.工业机器人的发展历程
研究团队系统梳理了工业机器人核心技术的长期演进历程和规律(图1),将其划分为三大阶段:自动化时代(1960s-1980s)、感知化时代(1980s-2020s)和具身智能时代(2020s-至今)。每一代工业机器人技术往往都以前一个时代为基础,而当前正处于具身智能时代的早期,目标是实现工业机器人的任务级柔性,即工业机器人领域的通用人工智能。
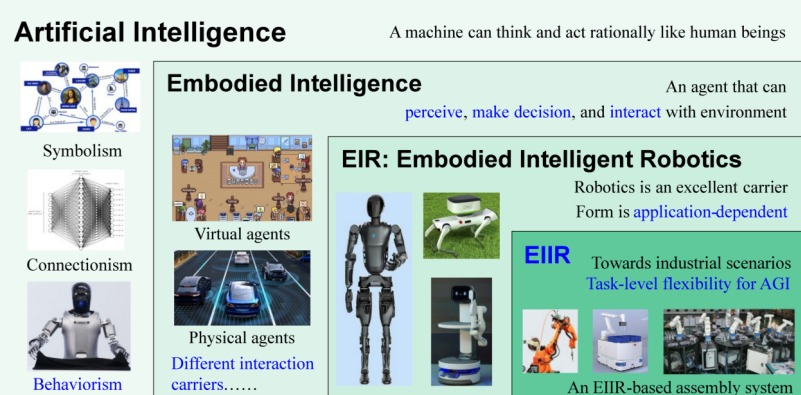
图2.具身智能工业机器人与其他学科领域的关系
在此基础上,研究团队将EIIR定义为具有“感知-决策-执行”能力的工业智能体方法和技术,在工业环境中可实现高效、准确、安全的交互,以实现任务级柔性。同时,团队厘清了EIIR与AI(人工智能)、EI(具身智能)、EIR(具身智能机器人)概念之间的关系(图2)。
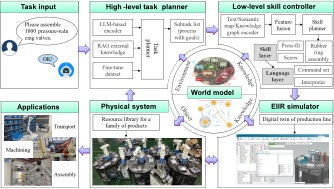
图3.知识驱动的具身智能工业机器人技术框架
针对工业场景对效率、精度、可靠性、安全性的要求,研究团队提出EIIR至少需要具备三类知识:一是支撑自然语言理解和人机交互的通用知识,二是描述生产线空间布局、设备位置、可操作区域和环境约束的工作环境知识,三是描述产品结构、工艺流程、零部件关系等的操作对象知识。基于这一认识,团队系统性地提出了知识驱动的具身智能工业机器人技术框架(图3)。该框架由世界模型(“三类知识”)、高层任务规划器(“大脑”)、低层技能控制器(“小脑”)、具身智能工业机器人仿真器和物理系统五个模块组成。此外,团队还系统梳理了知识驱动EIIR技术框架的各个模块关键技术进展。

图4.具身智能工业机器人的落地应用
目前,研究团队已针对知识驱动的EIIR技术框架中各模块开展了深入研究,例如语义地图构建和基于知识图谱的装配任务规划模型等。该工作是团队2024年提出具身智能柔性装配系统的重要延续,未来,团队将聚焦研发基于具身智能工业机器人的柔性装配单元,旨在解决产品个性化时代的多品种、小批量跨品类产品装配需求,为智能装配系统探索新范式。该框架降低了具身智能技术落地的门槛(图4),部分技术模块已获得产业化应用,创造了良好的经济效益。
研究成果以“具身智能工业机器人:框架与技术”(Embodied Intelligent Industrial Robotics: Framework and Techniques)为题,于6月1日发表于《制造系统杂志》(Journal of Manufacturing System)。
本文转自媒体报道或网络平台,系作者个人立场或观点。我方转载仅为分享,不代表我方赞成或认同。若来源标注错误或侵犯了您的合法权益,请及时联系客服,我们作为中立的平台服务者将及时更正、删除或依法处理。




联系电话:
010-61853490
新闻投稿:
server@icviews.cn
商务合作:
business@icviews.cn
问题反馈:
19800315212(微信同号)


半导纵横公众号

半导纵横小程序